Робот-краб поможет исследовать морское дно
Статья опубликована в Science Robotics.
Развитие подводной робототехники существенно упростило работу всем, кто изучает море, от геологов и экологов до морских биологов. Почти единственная альтернативна использованию дистанционно управляемых аппаратов — нырять самим исследователям, что тяжело, требует специальных навыков и состояния здоровья, а иногда и просто опасно.
В основной своей массе применяемые сейчас морские роботы — это миниатюрные подводные беспилотники, управляемые по кабелю, реже — автономно, поскольку под водой практически невозможна радиосвязь. В редких случаях для изучения фауны применяются роботы, внешне похожие на рыб, чтобы меньше пугать морских обитателей.
Между тем, у плавающих аппаратов есть ряд недостатков. Во-первых, они зависят от течений и почти не могут неподвижно пассивно неподвижно зависнуть: их позиция может сохраняться только за счет работы двигателей. Во-вторых, отсутствие твердого упора затрудняет взятие геологических или биологических образцов, да и сами манипуляторы существенно мешают плавать. Наконец, чем сложнее ландшафт, тем труднее подобраться непосредственно к донному грунту вплавь.
Джиакомо Пикарди (Giacomo Picardi) из Школы перспективных исследований имени святой Анны и его коллеги предложили решить эти проблемы, спроектировав робота, который не плавает, а ходит по дну. После серии экспериментов ученые пришли к выводу, что оптимальный способ хождения по дну уже выработан в природе, и его используют крабы, и именно их облик во многом наследует аппарат SILVER2.

Picardi et al. / Science Robotics, 2020
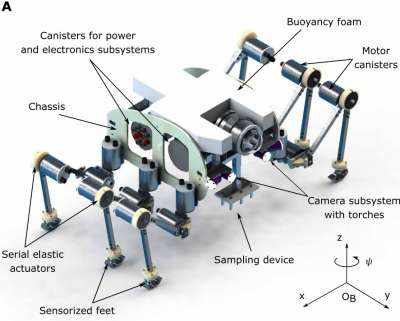
Его шесть длинных широко расставленных ног обеспечивают хорошую устойчивость, позволяют перешагивать препятствия и двигаться в любом направлении. За счет того, что при нормальной походке конечности подогнуты, аппарат может их вытягивать в поиске опоры, например, если нога попала в лунку. Кроме того, в суставах робота-краба установлены пружины, сжимающиеся при сгибании. За счет этого, а также за счет блоков пены, уменьшающей вес в воде, аппарат может при помощи пружин сильно оттолкнуться и запрыгнуть на уступ до десяти сантиметров без использования больших мощных приводов.
Аппарат размером 60 на 35 сантиметров несет на себе блок электроники, аккумулятор, инерциальную навигационную систему навигации, датчики прикосновений и две камеры. Снизу робота располагается платформа для установки полезной нагрузки, куда можно смонтировать манипуляторы, буры для забора образцов или научные инструменты. Поскольку ходящему механизму легко встать на одном месте, робот может смотреть в одну точку с близкого расстояния много дней без расхода энергии на передвижение, что удобно для долгосрочных научных наблюдений. За счет того, что на SILVER2 можно устанавливать разные инструменты, он может пригодиться как для изучения горных пород, так и для наблюдений за флорой и фауной или для исследований климата.
Для связи механический краб буксирует за собой плывущий по поверхности буй. Буй снабжен антенной и привязан к роботу кабелем, по которому передаются данные. Антенна работает по стандарту Wi-Fi, поэтому аппаратом можно управлять с обычного ноутбука, находящегося неподалеку.